|
Hi, I'm a PhD student with TUM CAMP, PRS, MCML supervised by Prof. Benjamin Busam and Prof. Nassir Navab. During my study, I conducted research at CAMP, PRS with Prof. Olaf Wysocki, HKUST-GZ with Prof. Haoang Li and CVG with Prof. Daniel Cremers. My research interests lie in the interplay between 3D computer vision and robotics, with a focus on camera/object localization, 3D/4D reconstruction, depth estimation, neural scene representations and robot grasping. I am also broadly interested in large language models (LLMs), multi-modal learning combining vision and language, and Embodied AI. Email / Google Scholar / Github / Linkedin |
|
|
|
|
[10-2025] We are co-organizing workshop and challenge on Category-Level Object Pose Estimation in the Wild and Transparent & Reflective objects In the wild Challenges in ICCV 2025. [07-2025] Our paper HouseCat-TRICKY has been accepted to ICCVW 2025. [04-2025] Our paper Texture2LoD3 has been accepted to CVPRW 2025. [02-2025] Our paper GCE-Pose has been accepted to CVPR 2025. [10-2024] I successfully defended my Master's Thesis (GCE-Pose) at CAMP with the highest grade, 1.0. [09-2024] Our paper SCRREAM has been accepted to NeurIPS 2024. [07-2024] Our paper kb-pbd has been accepted to IROS 2024. [06-2024] Our team received an Honorable Mention Award in the S23DR Challenge at CVPR 2024. |
|
|
|
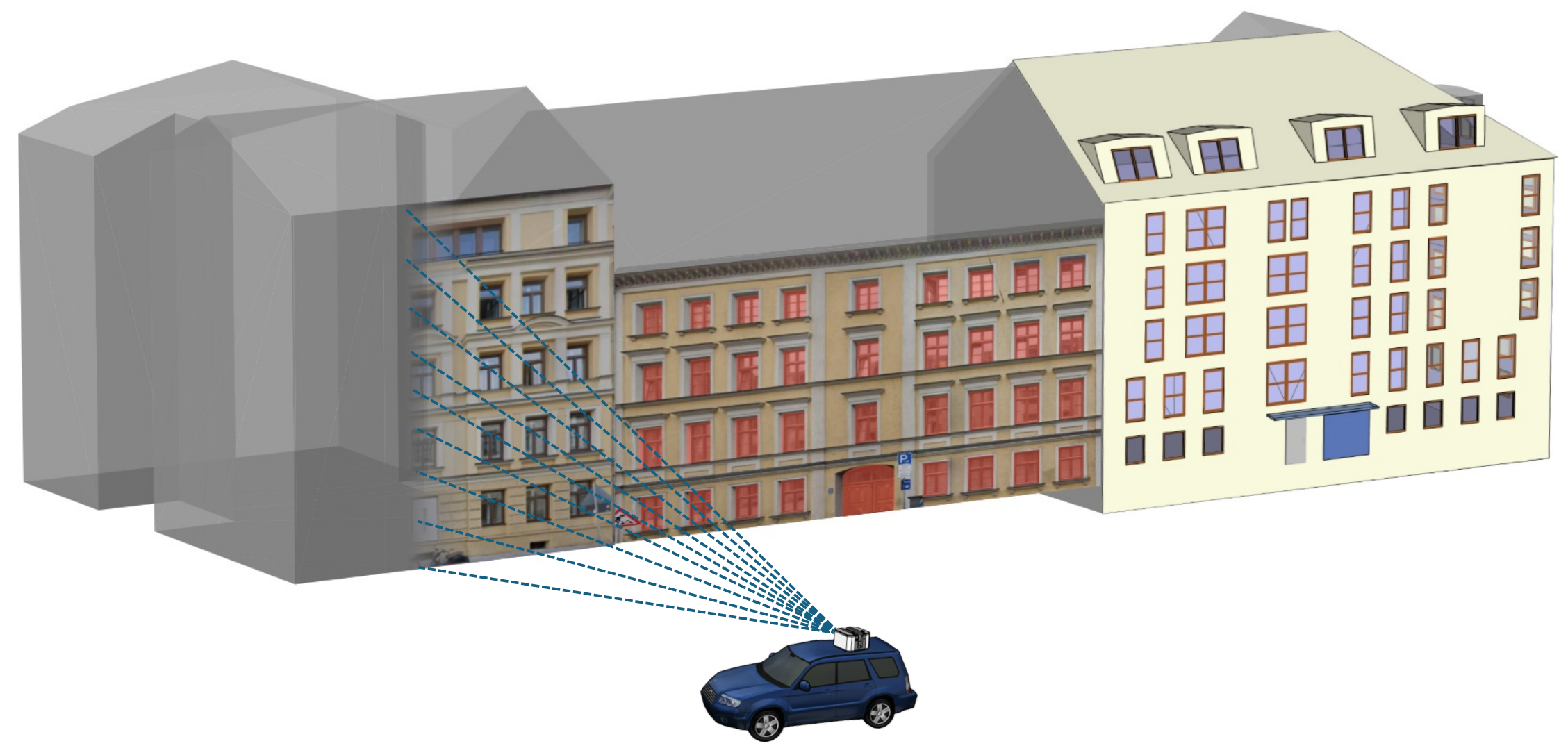
Wenzhao Tang*, Weihang Li*, Xiucheng Liang, Olaf Wysocki, Filip Biljecki, Christoph Holst, Boris Jutzi Computer Vision and Pattern Recognition Conference Workshop on Urban Scene Modeling (CVPRW), 2025 arXiv / Project Page / Code Texture2LoD3 proposes leveraging ubiquitous street-level images and low-level building models for accurate ortho-texturing (left): Enabling accurate semantic segmentation (center) and facade-rich LoD3 reconstruction (right). |
|
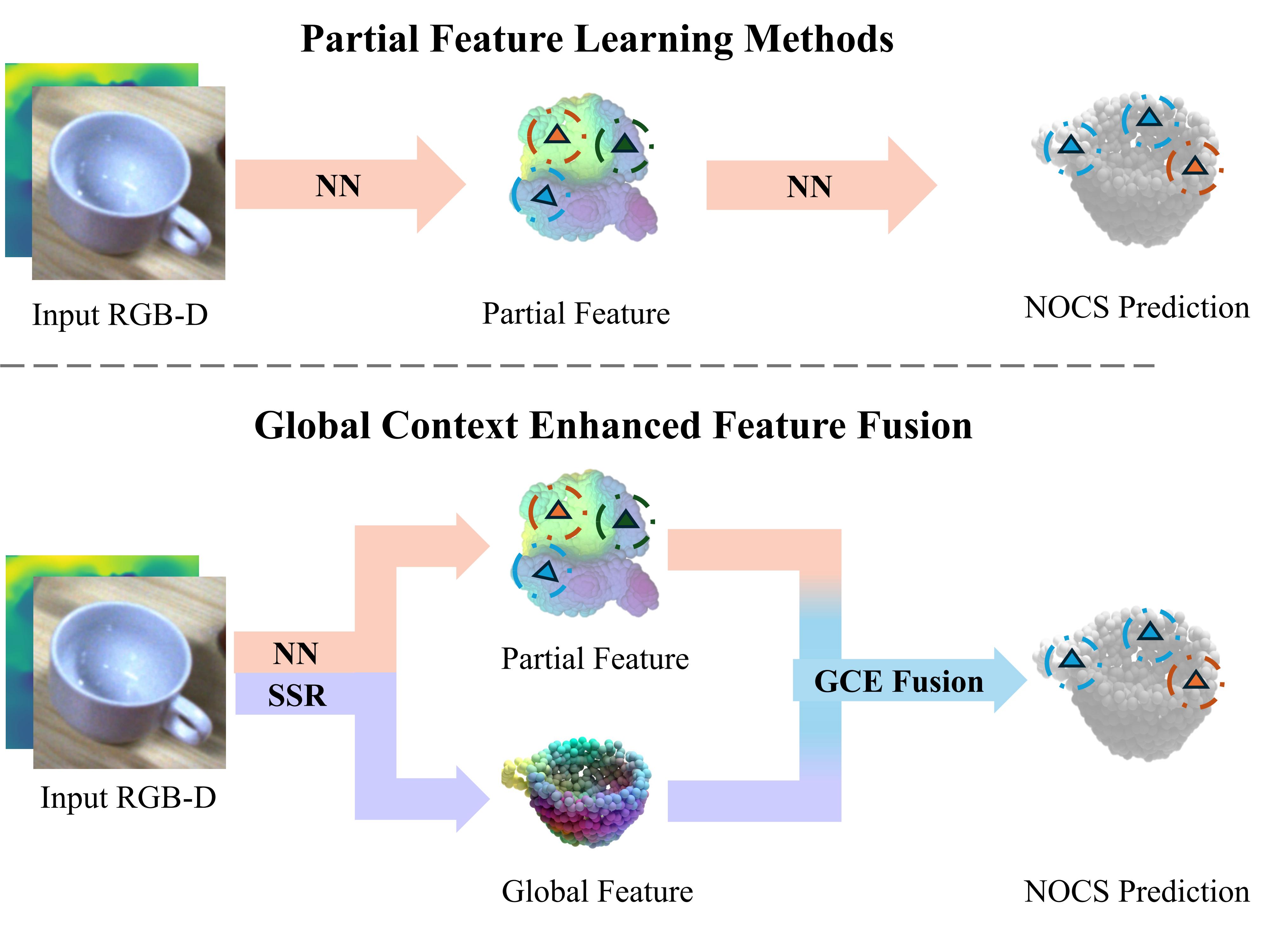
Weihang Li*, Hongli Xu*, Junwen Huang*, HyunJun Jung*, Peter KT Yu, Nassir Navab, Benjamin Busam Computer Vision and Pattern Recognition Conference (CVPR), 2025 arXiv / Project Page A semantic shape reconstruction module that recovers complete object geometry from partial observations with a global context-enhanced feature fusion mechanism that leverages category-level semantic and shape priors for robust pose prediction |


|
Weihang Li*, Weirong Chen*, Shenhan Qian, Benjamin Busam, Daniel Cremers, Haoang Li arXiv , 2024 arXiv / Project Page / Code A novel method to achieve Gaussian splatting from an un-posed image pair in dynamic environments. |
|
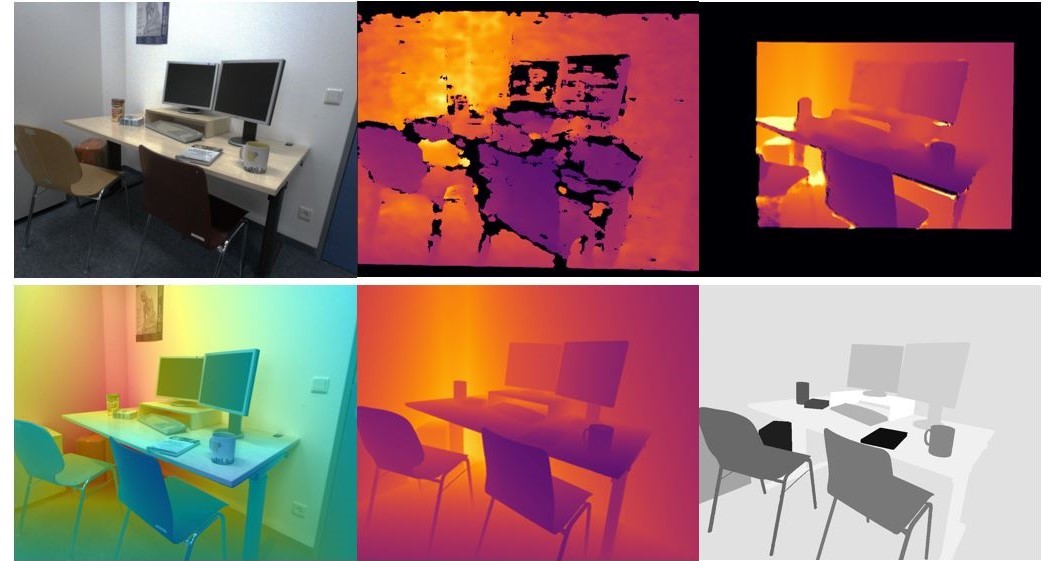
HyunJun Jung, Weihang Li, Shun-Cheng Wu, William Bittner, Nikolas Brasch, Jifei Song, Eduardo Pérez-Pellitero, Zhensong Zhang, Arthur Moreau, Nassir Navab, Benjamin Busam In Proceedings of the Neural Information Processing Systems (NeurIPS), 2024 arXiv / Project Page / Code A framework to annotate accurate and dense 3d indoor scenes with a benchmark on novel view synthesis and SLAM |
|
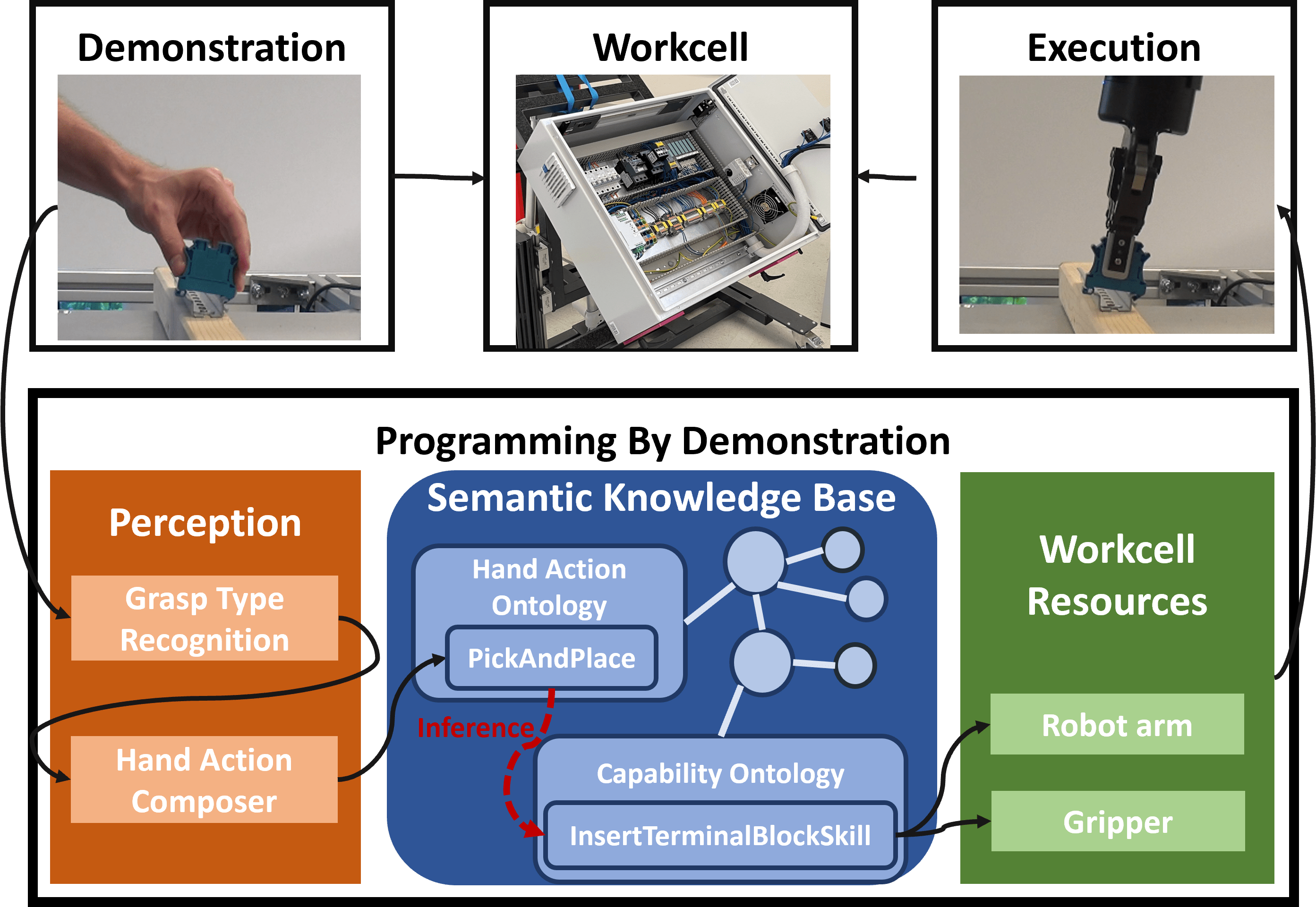
Junsheng Ding, Haifan, Zhang, Weihang Li, Liangwei Zhou, Alexander Perzylo International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Project Page / Code / Video A knowledge-based Programming by Demonstration (kb-PbD) paradigm to facilitate robot programming in small and medium-sized enterprises (SMEs). |
|
|
| TUM Photogrammetry & Remote Sensing | Mentor: Olaf Wysocki | 04/2024 - 03/2025 |
| fortiss Robotics Lab | Mentors: Junsheng Ding, Alexander Perzylo | 10/2022 - 09/2023 |
|
|
-
Teaching Assistant: Introduction to Machine Learning, TUM, 2024.
Teaching Assistant: Advanced Topics in 3D Computer Vision, TUM, 2025.
Teaching Assistant: Modern Computer Vision Methods, TUM, 2025.
|
|
- Conference Reviewer: CVPR, ICCV, IROS, NeurIPS
|
Last updated: July 2025
|